2022/01/04
Kapitel 4: Last- und Geschwindigkeitsmerkmale eines elektrischen Linearzylinders
Nachrichten / Artikel

Wenn Sie ein neues Projekt für Ihr Unternehmen entwickeln, gibt es viele Merkmale zu berücksichtigen, um die ideale elektrische Linearbewegungslösung für Ihre Anwendung zu wählen.
Durch die Anpassung verschiedener Parameter wie Schneckengetriebecharakteristik, Motordrehzahl, Getriebeübersetzung und elektrische Antriebsdrehzahl konstruiert TiMOTION einen elektrischen Antrieb mit Last- und Geschwindigkeitsfähigkeiten, die Ihren Anforderungen entsprechen.
Die verschiedenen Arten von Schnecken
Der gewählte Schneckentyp bestimmt zum Teil die Geschwindigkeit des Elektrozylinders und seine Tragfähigkeit. TiMOTION produziert elektrische Linearzylinder mit Gewinde- oder Kugelumlaufspindel. Es gibt drei Arten von Steigungen bei Gewindeschrauben: Vierkantsteigung, ACME-Steigung oder Sägezahnsteigung.
Die Gewindeschnecke
TiMOTION stellt eine Gewindeschraube mit einer ACME-Steigung her (kompatibel mit einer ACME-Mutter). Die ACME-Gewindesteigung bietet eine hohe Tragfähigkeit, ist aber aufgrund der erhöhten Reibung zwischen Mutter und Gewinde nicht so schnell wie eine Kugelumlaufspindel. Sie ist bei allen TiMOTION Elektrozylindern zu finden, zum Beispiel bei folgenden Antrieben: TA2, TA4, TA6, TA23.
Die Kugelumlaufspindel
Die andere Art von Spindel, die in unseren elektrischen Linearantrieben verwendet wird, ist die Kugelumlaufspindel. Dies ist bei dem MA1 der Fall. Die Kugelgewindespindel erzeugt weniger Reibung als die ACME-Schraube, da die Welle eine kreisförmige Bahn bietet, in der die Kugeln in der Mutter leichter gleiten können als bei einem ACME-System. Dadurch können mit dem Kugelgewinde höhere Geschwindigkeiten erreicht. Andererseits ist der Kugelmechanismus nicht unumkehrbar und erfordert eine mechanische Bremse, damit der Zylinder mit einer Last eingefahren und in einer bestimmten Position gehalten werden kann.
Spezifikationen
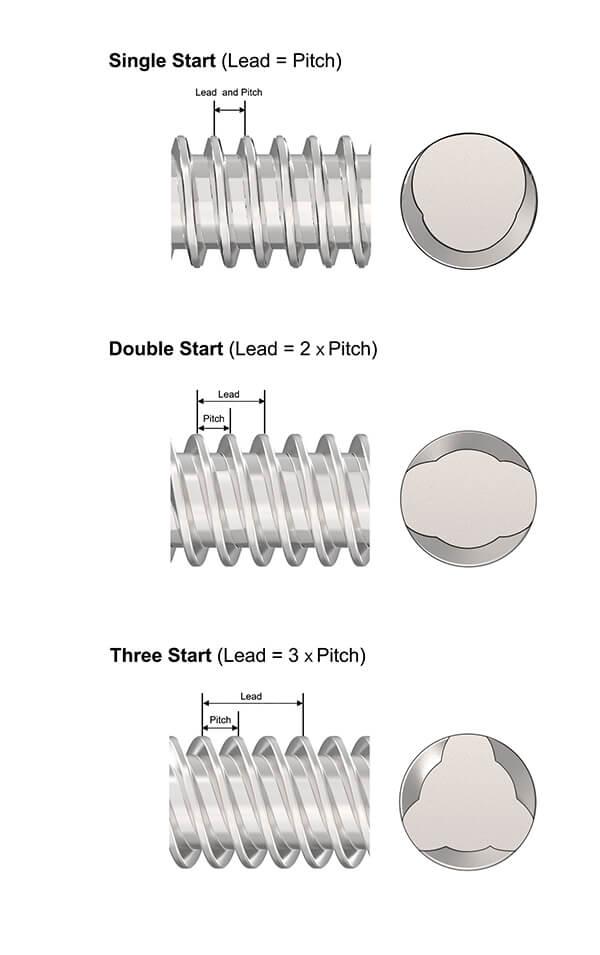
Die Eigenschaften des Schneckengetriebes haben auch einen wichtigen Einfluss auf die Geschwindigkeit des Elektrozylinders, vor allem aber auf die Last, die getragen werden kann. Die Eigenschaften der Schnecke hängen von der Schneckensteigung, der Gesamtschneckensteigung und der Anzahl der Gänge ab.
Die Spindelsteigung ist der axiale Abstand zwischen dem Scheitelpunkt der einen Steigung und dem der benachbarten Steigung. Die Gesamtsteigung ist der lineare Weg, den die Mutter zurücklegt, wenn sie eine vollständige Umdrehung auf der Schraube ausgeführt hat. Der Anfang ist die Anzahl der Schritte, die um die Schraube gewickelt werden.
Drehgeschwindigkeit (RPM) und Getriebeübersetzung
Ein weiteres Element, das die Geschwindigkeit und Belastbarkeit eines Elektrozylinders bestimmt, ist die Geschwindigkeitseinstellung und das Übersetzungsverhältnis des Getriebes.
Das Übersetzungsverhältnis ist das Verhältnis der Umdrehungen pro Minute (U/min) des Antriebsrades zur U/min des angetriebenen Rades. Wenn z. B. das Antriebszahnrad eines Stirnrads 12 Zähne hat und das Abtriebszahnrad 24 Zähne, dann ist das Abtriebszahnrad doppelt so groß wie das Antriebszahnrad. Das Antriebszahnrad muss sich dann zweimal drehen, um eine Umdrehung des angetriebenen Zahnrads zu machen, so dass das Übersetzungsverhältnis 2:1 beträgt.
Je nach dem Verhältnis zwischen Kraft und Geschwindigkeit, das erforderlich ist, können zusätzliche Gänge in die Gleichung aufgenommen werden. Bei einem linearen elektrischen Zylinder sind Kraft und Geschwindigkeit durch die folgende Formel verknüpft: Mechanische Leistung = Kraft x Geschwindigkeit.
Was bedeutet das für uns? Angenommen, Ihre Anwendung erfordert eine besonders hohe Tragfähigkeit. In diesem Fall kann TiMOTION weitere Zahnräder hinzufügen und das Übersetzungsverhältnis anpassen, um ein höheres Drehmoment im Mechanismus zu erzeugen, wodurch letztlich mehr Kraft auf das Schneckengetriebe ausgeübt und somit die Last bewegt werden kann.
Die erforderliche mechanische Leistung
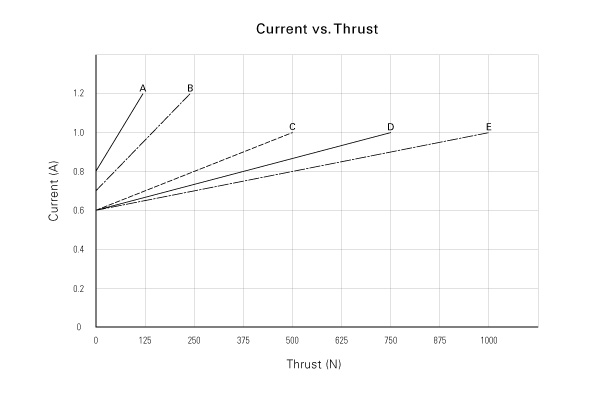
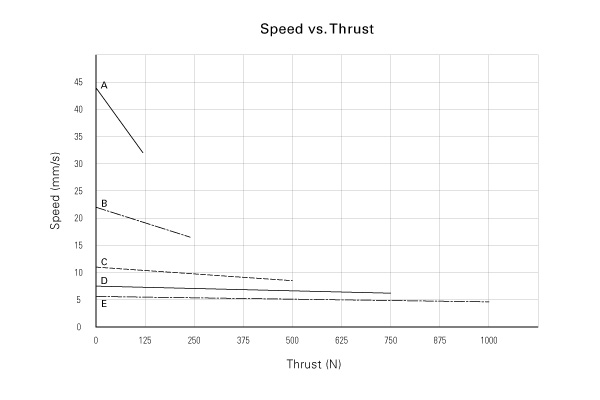
Bei der Festlegung der Geschwindigkeit und der Tragfähigkeit eines Elektrozylinders kann man auch die für den Betrieb der Anwendung erforderliche mechanische Leistung berücksichtigen. Diese Leistung wird in Watt gemessen. Die wichtigste Information, die man sich über Strom, Geschwindigkeit und Last von Gleichstrommotoren merken sollte, ist, dass mit zunehmender Last der Strom steigt und die Geschwindigkeit tendenziell abnimmt (wie in den obigen Diagrammen dargestellt).
Neben diesem grundsätzlichen Zusammenhang beeinflussen viele weitere elektromechanische Parameter die Last und die Geschwindigkeit, wie z. B. die Art der verwendeten Stromversorgung oder die Leistung des Motors. Bei der Herstellung eines Elektrozylinders untersucht TiMOTION jeden dieser Parameter, um die beste Lösung für die Anwendungen seiner Kunden zu finden.
TiMOTION stellt elektrische Transformatoren her, die mit unseren 12V DC, 24V DC und 36V DC elektrischen Linearantrieben kompatibel sind. Da die meisten TiMOTION-Zylinder mit Gleichstrom (DC) betrieben werden, können unsere Steuerboxen Wechselstrom (AC) in Gleichstrom (DC) umwandeln, so dass die Kunden ihre Anwendungen an die Steckdose anschließen können.
TiMOTION kann auch ein Schaltnetzteil (SMPS) oder einen Ringkerntransformator in die Steuerbox integrieren. SMPS-Transformatoren unterstützen sowohl 110V AC- als auch 220V AC-Steckdosen, so dass unsere Kunden ihre Produkte an verschiedene Steckdosen weltweit anschließen können.
Nachstehend finden Sie eine Übersichtstabelle der Begriffe und Umrechnungen. Die erste ist für die Spannungseigenschaften, die zweite für die Umrechnung von Newton (N) in Pfund (Lbs) und Kilogramm (Kg) und die dritte für die Umrechnung von Millimetern (mm) in Zoll (IP).
Ausdrücke der Spannung
|
12 Volt DC |
12V DC |
12 VDC |
|
24 Volt DC |
24V DC |
24 VDC |
|
36 Volt DC |
36V DC |
36 VDC |
|
48 Volt DC |
48V DC |
48 VDC |
|
110 Volt AC |
110V AC |
110 VAC |
|
220 Volt AC |
220V AC |
220 VAC |
Gewichtsumrechnung (N - Lbs - kg)
|
1 Newton (N) |
.22481 Pfund (Lbs) |
|
1 Newton (N) |
.1 Kilogramm (kg) |
Abstand (mm - in)
|
1 Millimeter (mm) |
.03937 Zoll |
Damit ist das Kapitel über Tragfähigkeit und Geschwindigkeit abgeschlossen. Wir hoffen, Ihnen ein besseres Verständnis dafür vermittelt zu haben, wie diese Parameter bei der Konstruktion eines Zylinders definiert werden und wie Sie die am besten geeignete Lösung für Ihr Projekt auswählen können.
Das nächste Kapitel ist den Schutzklassen (IP) gewidmet, die einen zusätzlichen Schutz von Elektrozylindern gegen feste und flüssige Verunreinigungen bieten.
Wenn Sie weitere Fragen haben oder Unterstützung für Ihr Projekt wünschen, wenden Sie sich bitte an die Vertriebsabteilung in Ihrer Nähe!
Zugehörige Artikel

Kapitel 2: Aufbau eines elektrischen Linearmotors

Kapitel 1: Was ist ein elektrischer Linearmotor? Definition und Typen erklärt

Was sind Aktuatoren? Beispiele unterschiedlicher Aktuatoren

Wasserdichte Linearantriebe von IP54 bis IP69K

12V Linear Actuators: Power from 1000N to 10000N

TiMOTION-Kompakt-Linearantriebe: Anwendungen und Modelle

Kapitel 5: IP-Schutzarten und Schmierung von Elektrozylindern

How To Choose An Electric Linear Actuator?

Kapitel 3: Sicherheitsoptionen für elektrische Linearzylinder
