2022/01/04
Hoofdstuk 4: De belasting- en snelheidskenmerken van een elektrische lineaire actuator
Nieuws/Artikelen

Bij het ontwikkelen van een nieuw project voor uw bedrijf moet u rekening houden met heel wat kenmerken om de ideale lineaire elektrische bewegingsoplossing voor uw toepassing te kiezen.
TiMOTION ontwerpt een elektrische actuator met aan uw behoefte aangepaste belastings- en snelheidskenmerken door het personaliseren van verschillende parameters zoals de spindel, het aantal omwentelingen per minuut van de motor (tpm), de overbrengingsverhouding en de snelheid van de elektrische actuator.
De verschillende soorten spindels
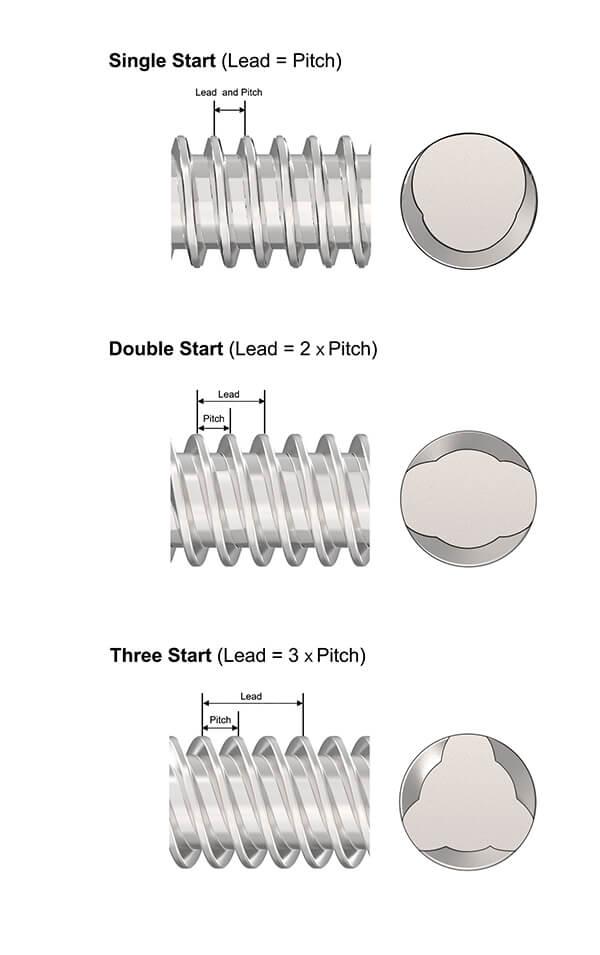
Het gekozen type spindel is mede bepalend voor de snelheid van de elektrische actuator en het draagvermogen. TiMOTION vervaardigt lineaire elektrische actuatoren met een schroefdraadspindel of kogelomloopspindel. Een schroefdraad kan beschikken over: een vierkante spoed, een ACME-spoed of een spoed met zaagtandvorm.
De schroefdraadspindel
TiMOTION vervaardigt een schroef met ACME-schroefdraad (compatibel met een ACME-moer). De ACME-schroefdraad biedt een hoog draagvermogen, maar is niet zo snel als een kogelomloopspindel vanwege de verhoogde wrijving tussen de moer en de schroefdraad. Hij is te vinden op alle elektrische actuatoren van TiMOTION, zoals: TA2, TA4, TA6, TA23.
De kogelomloopspindel
De kogelomloopspindel is een ander type spindel dat we in onze elektrische lineaire actuatoren gebruiken. Bijvoorbeeld voor MA1. De kogelomloopspindel creëert minder wrijving dan de ACME-schroef. De as biedt immers een cirkelvormige baan voor de spindelkogels die zo gemakkelijker schuiven dan in een ACME-systeem. Hierdoor kunt u met de kogelomloopspindel hogere snelheden behalen. Aan de andere kant kunt u met het kogelmechanisme niet profiteren van een onomkeerbaarheidskracht. Bovendien hebt u een mechanische rem nodig om de actuator met een last te helpen inschuiven en deze in een bepaalde positie te houden.
Specificaties
De eigenschappen van de spindel hebben ook een belangrijke invloed op het toerental van de elektrische actuator, maar vooral op de te dragen last. De kenmerken van de spindel zijn afhankelijk van de schroefdraad, de spoed en het aantal omwentelingen.
De schroefdraad is de axiale afstand tussen de bovenkant van een spoed en die van de aangrenzende spoed. De spoed is de lineaire afstand die de moer aflegt wanneer deze een volledige omwenteling rond de schroef heeft gemaakt. Het aantal omwentelingen is het aantal schroefdraden dat om de schroef is gewikkeld.
Rotatiesnelheid (tpm) en overbrengingsverhouding
De instelling van de rotatiesnelheid en de overbrengingsverhouding van de tandwielenset heeft ook een invloed op de snelheid en het draagvermogen van een elektrische actuator.
De overbrengingsverhouding is de verhouding tussen het aantal omwentelingen per minuut (tpm) van het aandrijftandwiel en het aantal tpm van het aangedreven tandwiel. Als een aandrijftandwiel bijvoorbeeld 12 tanden heeft en het aangedreven tandwiel 24, dan is het aangedreven tandwiel twee keer zo groot als het aandrijftandwiel. Het aandrijftandwiel moet dan twee keer draaien om één omwenteling van het aangedreven tandwiel te voltooien. We spreken dan van een overbrengingsverhouding van 2:1.
Afhankelijk van de vereiste verhouding tussen kracht en snelheid kunnen we extra tandwielen toevoegen. Bij een lineaire elektrische actuator heerst tussen kracht en snelheid de door de volgende formule aangeduide verhouding: Mechanisch vermogen = kracht x snelheid.
Wat betekent dit nu concreet? Stel dat uw toepassing een bijzonder hoog draagvermogen vereist. In dit geval kan TiMOTION meer tandwielen toevoegen en de overbrengingsverhouding aanpassen om meer koppel in het mechanisme te creëren. Hierdoor is het ten slotte mogelijk om meer kracht op de spindel uit te oefenen en dus meer last te verplaatsen.
Het benodigde mechanische vermogen
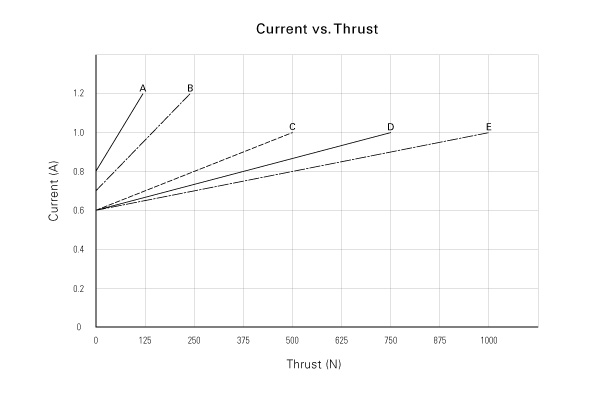
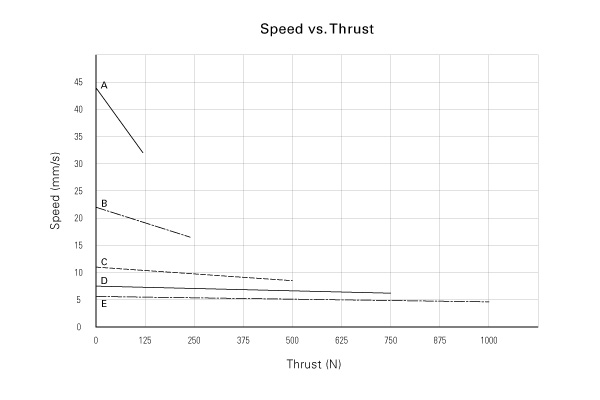
Bij het definiëren van de snelheid en het draagvermogen van een elektrische actuator moeten we ook rekening houden met de benodigde hoeveelheid mechanisch vermogen om de toepassing te laten werken. Dit vermogen wordt gemeten in Watt. Naarmate de belasting toeneemt, neemt de stroom toe en neemt de snelheid af (zoals weergegeven in de bovenstaande grafieken). Dat is de belangrijkste informatie die we moeten onthouden over het verband tussen de stroom, de snelheid en de belasting van DC-motoren.
Naast deze basisrelatie beïnvloeden vele andere elektromechanische parameters de belasting en het toerental, zoals het gebruikte type voeding of het vermogen van de motor. Bij de productie van een elektrische actuator bestudeert TiMOTION elk van deze parameters om de best geschikte oplossing voor de toepassingen van zijn klanten te kiezen.
TiMOTION vervaardigt elektrische transformatoren compatibel met onze lineaire elektrische actuatoren van 12V DC, 24V DC en 36V DC. De meeste TiMOTION-actuatoren werken op gelijkstroom (DC). Daarom kunnen onze bedieningskasten wisselstroom (AC) omzetten in gelijkstroom zodat klanten hun toepassingen via een stroomkabel kunnen voeden.
TiMOTION kan ook een SMPS-transformator (Switch Mode Power Supply) of ringkerntransformator in de controle box integreren. SMPS-transformatoren ondersteunen 110 V AC- en 220 V AC-stopcontacten, zodat onze klanten hun producten op verschillende stopcontacten in de hele wereld kunnen aansluiten.
Hieronder vindt u een overzichtstabel met eenheden en omzettingen. De eerste betreft de spanningskarakteristieken; de tweede betreft de omrekening van Newton (N) naar pond (lbs) en kilogram (kg); en de derde betreft de omzetting van millimeter (mm) naar inch (in).
Spanningsnotaties
|
12 Volt DC |
12V DC |
12 VDC |
|
24 Volt DC |
24V DC |
24 VDC |
|
36 Volt DC |
36V DC |
36 VDC |
|
48 Volt DC |
48V DC |
48 VDC |
|
110 Volt AC |
110V AC |
110 VAC |
|
220 Volt AC |
220V AC |
220 VAC |
Gewichtsomzetting (N – lbs – kg)
|
1 Newton (N) |
0,22481 pond (lbs) |
|
1 Newton (N) |
0,1 kilogram (kg) |
Afstand (mm – inch)
|
1 millimeter (mm) |
0,03937 inch (in) |
Dit is het einde van ons hoofdstuk in verband met draagvermogen en snelheid. We hopen dat u nu een beter begrip hebt van hoe we deze parameters definiëren bij het ontwerpen van een actuator en hoe u de best geschikte oplossing voor uw project kunt kiezen.
In het volgende hoofdstuk hebben we het over de beschermingsklasse (IP) die elektrische actuatoren extra beschermt tegen vaste en vloeibare verontreinigingen.
Neem voor aanvullende vragen of ondersteuning van uw project contact op met de dichtstbijzijnde verkoopafdeling !
Gerelateerde Artikelen

Waarom TiMOTION de ideale partner is voor uw automatiseringsprojecten

Deel 1: Wat is een elektrische lineaire actuator en hoe kiest u deze?

Deel 9: Inleiding - De belangrijkste feiten over actuatoren

IP54 tot IP69K waterdichte lineaire actuatoren

12V lineaire actuatoren: vermogen van 1000 N tot 10000 N

TiMOTION Compacte Lineaire Actuatoren: Toepassingen en Modellen

Hoofdstuk 5: IP-beschermings- en smeerwaarden

Hoe kiest men een elektrische lineaire actuator?

Hoofdstuk 3: Veiligheidsopties voor elektrische lineaire actuatoren
